ROS robot platform
Hits: 83
nøgleord: ROS robot platform / open source robot platform / ROS-robotkit
Fem fordele af produkter
Fem fordele af produkter
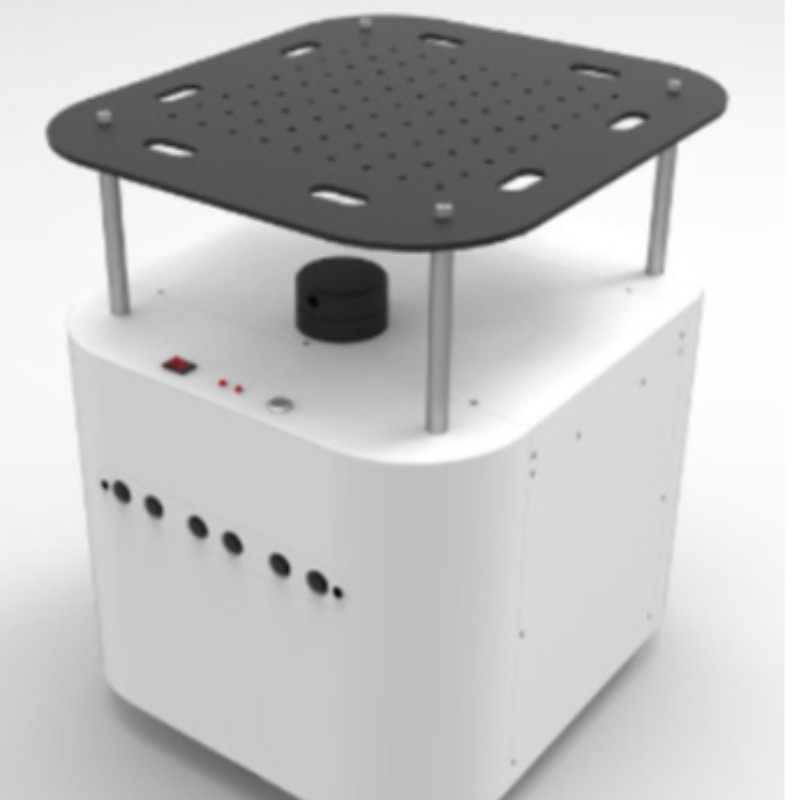
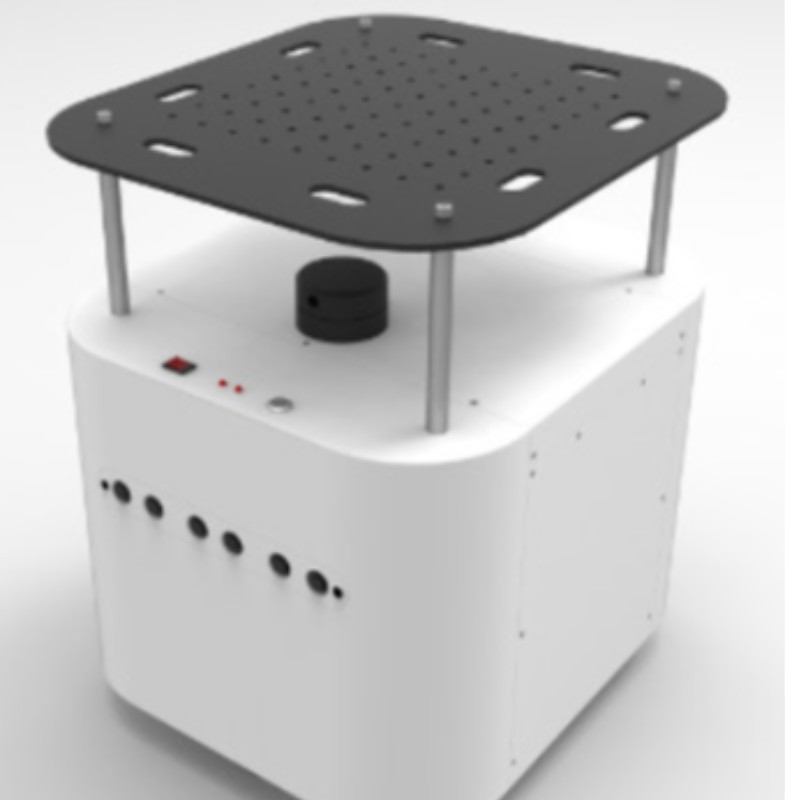
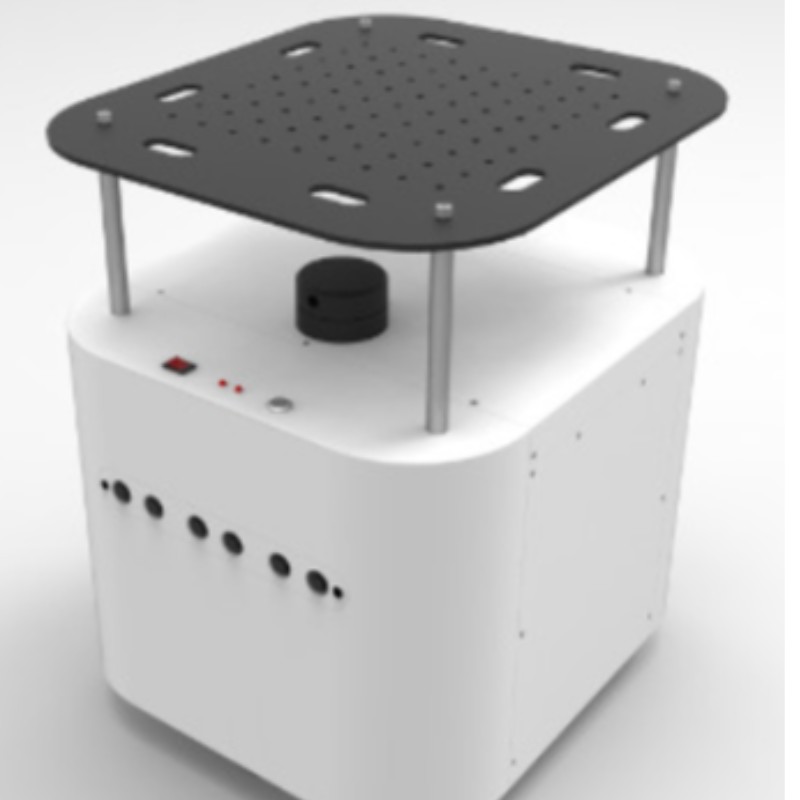
- YZ-01 ROS robot platform er en tohjulet differentiel og stor belastning robot bevægelse chassis platform baseret på ROS arkitektur. Det er meget velegnet til brug af ROS-robotentusiaster, universitetsstuderende og små og mellemstore virksomheders F & U-ingeniører.
- Chassisplatformen er en integreret hubmotor med høj effektivitet og høj belastning. Platformen kan indlæse op til 50 kg, og den maksimale gåhastighed kan nå 1 meter i sekundet. YZ-01s indbyggede DCDC strømkonverteringsmodul kan give fire forskellige spændinger på 5V, 12V, 19V og 24V, som dybest set kan løse strømforsyningsproblemerne hos langt de fleste computerkortkort og forskellige sensorer, som roboten har brug for.
- For at gøre det lettere for udviklere at udføre dybdegående research har ROS-platformen indbygget Intel Core-i5 industriel PC og installeret UBUNTU 16.04 O \/ S + ROS Kinetic-pakker. Samtidig giver ROS-robot YZ-01A, som andre ROS-platformrobotter, open source basale ROS-applikationseksempler og grundlæggende bevægelsesdrevne knudeprogrammer, der giver udviklere mulighed for at bruge det meget let.
- ROS-kommunikation RS232 、 USB
- Vejledning til automatisk opladning LIDAR + Infrarød sensor
Produktdetaljer
Produktdetaljer
Forespørgsel
2026 Shenzhen ABT Electronics CO.,LTD Alle rettigheder forbeholdes.